中国研首部「星际矿工」或实现登月采太空资源(组图)
发布 : 2025-3-18 来源 : 明报新闻网 用微信扫描二维码,分享至好友和朋友圈 | 加关注  明声网温哥华 微信公众号 |
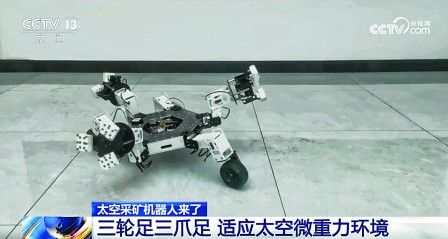
中国首部太空采矿机械人近日由中国矿业大学研制,该机械人为六足模式。(央视画面)

中国首部太空采矿机械人在月面采矿的模拟图。(央视画面)
六足模式+阵列式爪刺
「央视新闻」报道,这款「星际矿工」由中国矿业大学机电工程学院教授刘新华领衔的团队研制,基本形态为3个轮足(末端为车轮)加3个爪足(末端为锚固结构)的六足模式,有别于时下流行的人形机械人、机械狗。刘新华表示,仿生六足移动结构和阵列式爪刺,在外星的微重力环境下的附著能力更强,抓地能力更强,能够让机械人固定并采样、在小行星坑洼不平的地面移动。
太空采矿机械人要在太空星体上完成探矿采矿工作,还要面对极端温差、真空、太空辐射以及重量体积限制等一系列难题。中国矿业大学深地工程智能建造与健康运维全国重点实验室副教授李瑞林表示,研发团队搭建特殊的「训练场」,模拟月球表面环境,包括地球表面六分之一的重力场、超高真空、白天130℃、晚上-180℃甚至-250℃的低遄A加上和月壤性质相似的模拟月壤,再进行实验,可以得到跟实际月球表面接近的数据。
可适应复杂太空环境
实验环境一方面模拟近地小行星表面的沙壤,另一方面测试悬吊机构在微重力环境的性能。中国矿业大学机电工程学院副教授华德正表示,经过在沙盘上不断训练,太空采矿机械人通过六足差动系统悬架、离合器等协同,能根据工作环境调整自身结构形状,适应地外星体的复杂地表环境。
外星发展的第一步是要解决资源的问题。李瑞林表示,因此研究聚焦太空采矿,以及月球资源的开采,「月球资源特徵与储层物性原位探测方法与装备」、「月球极区水冰资源温控贯入开采与原位制氢方法与装备」是团队的重点科研项目。
中国矿业大学环境与测绘学院教授李怀展表示,小行星的矿产资源主要是稀土,以及铁、镍、钴等金属;月亮表面有核燃料氦-3,月球背面有水冰资源。
专家表示,基于现有的空间科学技术、航空航天技术以及采矿技术等,人类有望在几十年内实现试验性开采近地星体上的太空资源,月球为首选。